リサーチハイライト
Vol.3, March 2015
ロボットスーツが慢性期脊髄損傷患者の回復をアシスト
脊髄を損傷し、神経系の回復後時間を経た慢性期の患者では、筋力と協調性の喪失により可動性が制限されることがある。今回、ドイツと日本の研究者によって、体重を支えるハーネスと、サイバーダイン社により開発されたロボットスーツ(Hybrid Assistive Limb:HAL)を装着してトレーニングを行うことで、脊髄損傷患者の可動性が著しく改善することが示された。
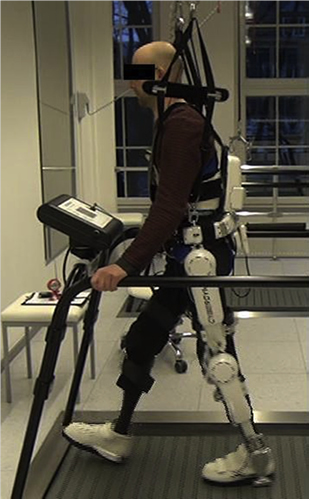
ドイツのベルクマンスハイル大学病院と筑波大学の研究者らは、慢性期に入りさらなる改善が見込めない8例の患者を対象に試験を実施した。トレーニングは、1回あたり90分の理学療法セッションを週5回、90日間実施した。各セッションでは、患者がHALを装着し、トレッドミル運動を行った。HALは患者の身体に装着した電極で生体電位信号を感知し、パワーユニットを稼働させ、患者の動きをアシストする。また、つま先の引きずりや膝くずれを防ぐため、患者は体重の約50%を支えるハーネスを装着した。
研究者らは、Time Up and Go(TUG)テストを用いて患者の可動性を評価した。同テストでは、車椅子から立ち上がり、3メートル歩いて向きを変え、歩いて戻るという動作に要する時間と補助を測定した。また、ドレッドミル運動時の歩行速度と距離を測定した。
試験開始当初、6分間歩行できる患者はわずか3例であったが、終了時には全員が可能となった。また、ドレッドミル運動時の歩行速度と距離、および歩長が増加する一方、TUG時間は低下した。
「ロボットスーツによる平地歩行の改善が示されたことで、歩行移動性への有益な効果が期待できる。今後、より大規模な臨床試験での評価が必要である」と、研究者らは論文を結んでいる。
Publication and Affiliation
Mirko Aach1*, Oliver Crucigera, Matthias Sczesny-Kaiser2, Oliver Höffken2, Renate Ch. Meindl1, Martin Tegenthoff2, Peter Schwenkreis2, Yoshiyuki Sankai3, Thomas A. Schildhauer4, Voluntary driven exoskeleton as a new tool for rehabilitation in chronic spinal cord injury: a pilot study. The Spine Journal 14 2847–2853, (2014).
- Department of Spinal Cord Injuries, BG University Hospital Bergmannsheil, Bürkle-de-la-Camp-Platz 1, 44797, Bochum, Germany
- Department of Neurology, BG University Hospital Bergmannsheil, Bürkle-de-la-Camp-Platz 1, 44797, Bochum, Germany
- Faculty of Engineering, Information and Systems, University of Tsukuba, 1-1-1 Tennodai, Tsukuba, Ibaraki 305-0006, Japan
- Department of General and Trauma Surgery, BG University Hospital Bergmannsheil, Bürkle-de-la-Camp-Platz 1, 44797, Bochum, Germany
*corresponding authors, e-mail address:bergmannsheil@bergmannsheil.de
Figure: